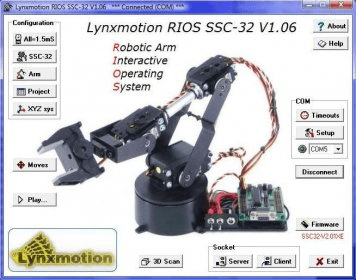
RIOS (Robotic arm Interactive Operating System) is a Windows 95/98SE/2000/XP/Vista program for controlling the AL5 series of robotic arms with the SSC-32. With RIOS, your robot can be taught sequences of motion via the mouse or joystick. This extremely powerful program uses external inputs to affect the robot's motion for closed loop projects. External outputs can also be controlled. 3D image capture is possible with a GP2D12.
Features:
- All Servos = 1.5mS.
Use the "All=1.5mS" button to set all servos to 1.5mS in order to make sure your arm is configured for the RIOS software.
- SSC-32 Config.
Test inputs, outputs, and configure the SSC-32 for your arm. The SSC-32 is fully customizable to your arm, no matter how yours is set up. There are also config settings for servos on channels 7 and 8, which are not used for the arm.
- Lynx Arm Config.
If you've made modifications to your arm, you can input custom values. If you're using the L5 or L6 arm, you can use the preset buttons to fill in size values.
- SSC-32 Firmware Updater.
RIOS automatically displays the SSC-32 firmware. You can easily update your firmware from the main screen.
- Torque Config for Gravity Compensate.
Adjust the weight of objects the arm will be picking up so that the program can adjust servo positions as needed.
- Geartrain Play
Use this feature to compensate for the play in the geartrains when shifting balance.
- Project Manager.
You can export your projects in .csv format for use as backups or to share with other RIOS users. If you want standalone functionality, you can also export to BASIC format for Basic Atom/Basic Stamp 2. Now it's easy to position the arm, and even easier to generate BASIC code! Import, rename, or delete projects, as well as edit project comments. Easily keep track of your projects and send them to other RIOS users as .csv files, which can be imported by RIOS, and read by Microsoft Excel and notepad.
- Moves / Motions.
Use the buttons in the upper right corner to move the arm. The mouse and / or a joystick can be used. Inverse Kinematics makes it simple to just move the gripper in X,Y,Z space. When moved into the position you'd like it to go to, add that position as a step. A group of Steps makes Sequences. A Project can contain one or more Sequences. You can even incorporate music or video into the program. Clicking on the arm display picture changes to another view.
- Joystick.
Use a Playstation 2 controller to program the arm.
- Play.
Make the robot move according to your program. Select the program and press Play. The image in the middle shows exactly what the arm is doing in real time -- it even includes ghosting of the next move! Clicking on the arm display picture changes to another view. External inputs can be used by the program to control which Sequence is run. The inputs have Do-While, For-Next, and If-Then-Else support. You can even program it to close the gripper until a switch closure occurs! Trigger inputs and watch outputs turn on and off. Use the sequence list for programming using If-Then-Else, For-Next, and Do-While loops. Play the whole project, individual sequences, or a programmed sequence list.
- Output Options.
Set output delays, durations, and speeds. For example, you can set one output to blink continuously while another turns on steady for two seconds then turns off.
- Play Log.
Play log lists everything that is going on. It shows exactly which move the arm is executing, which inputs are being triggered, which programming loops are being dealt with, and it's all in real-time!
- 3D image Capture.
3D image capturing is supported. 3D image capture experimentation can be done with the addition of a single GP2D12 sensor.
Comments